Servodelay
In meinem neuen Boot wird ein Klappschnorchel eingebaut werden. Für die Umsetzung des Antriebs hatte ich mir einige Varianten überlegt, bin zum Schluss bei einer ganz normalen Ansteuerung mittels Servo hängen geblieben, dies erschien mir die einfachste Möglichkeit. Ein Hauptproblem sollte allerdings die Servoansteuerung als solche sein. Ich wollte das Servo nicht einfach ansteuern weil es dann zu schnell gelaufen wäre, es musste also eine "Bremse" her.
Nach ein bisschen googlen habe ich auch eine passende Lösung mit meinem Lieblingschips gefunden: Auf der Seite http://www.diyrc.com/ habe ich eine kleine Schaltung nebst Programm gefunden, die mit einem PICAXE ein Servo verzögert. Die Schaltung hat einen Ein- und einen Ausgang. Am Eingang wird ein normaler Empfänger angeschlossen, am Ausgang das entsprechende Servo. Mit einem Poti kann man die Geschwindigkeit der Verzögerung einstellen. Die Signallänge wird 1:1 durchgeschliffen und nicht begrenzt. Leider kann die Geschwindigkeit während des Betriebes nicht verändert werden, das Poti wird nur beim Einschalten eingelesen.
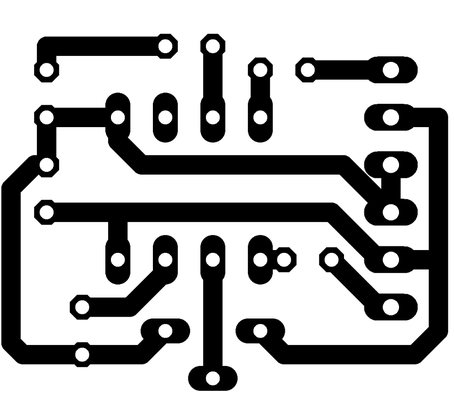
Ich habe die Schaltung mal in Eagle neu nachgezeichnet und auch ein entsprechendes Board entworfen. Bitte beachten, es gibt keinen Programmiereingang auf der Platine, der PICAXE muss also separat bespielt werden.

Das Programm
'Radio control servo slowdown using PICAXE-08M
'Kevin Goom, 17 October 2005
'Updated for new Picaxe S/W (changed loop to loop1, restart to restart1)
'
'
'PICAXE-08M connections are:
' Leg 1 +5V
' Leg 2 (Serial in) Tie to Ground through 10K resistor
' Leg 3 (In4/Out4) Wiper of 10K potentiometer connected to +5V & ground
' Leg 4 (In3) Pulse input from radio receiver
' Leg 5 (In2/Out2) Pulse output to servo
' Leg 6 (In1/Out1) Mode indicator output
'1/2 second flash = no valid signal
'Steady on = pass-through (no servo slowdown)
'Flicker = servo slowdown mode
' Leg 7 (Out0/Serial Out) NC
' Leg 8 Ground
symbol Delay=b8 'Name the delay factor
symbol PWin=w0 'Name the input pulse length
symbol PWout=b2 'Name the output pulse length
symbol PWinPrev=b3 'Name the length of the prior input pulse length
symbol PWinErr=b6 'difference between input &output pulse lengths
symbol skip=b4 'counter for skipping "Delay" times
restart1:
Skip=0
high 1
servo 2,135 'Center the servo initially and on input pulse loss
Pause 500 'Wait 1/2 second initially
toggle 1
readadc 4,Delay 'Read the voltage from the delay potentiometer
pulsin 3,1,PWin 'Measure the input pulse width initially
if PWin<75 or PWin>225 then restart1 'Go back if no valid input detected
high 1
low 2 'Stop the servo command if valid input detected
PWinPrev=PWin 'Initially set the prior pulse width to current pulse width
if Delay<3 then StraightThru 'If delay pot set near zero skip slowdown
Delay=Delay/60 'Set 0 (1.5s stop-to-stop) to 12 (20s stop-to-stop)
PWout=PWin 'Set output pulse to input pulse initially
loop1:
toggle 1
PWinPrev=PWin 'Reset the prior pulse width
pulsin 3,1,PWin 'Measure the input pulse
if PWin<75 or PWin>225 then restart1 'Go back if no valid input detected
PwinErr=PWin-PWOut
if PWinErr<2 or PWinErr>254 then StayPut 'Add 2 units of hysteresis
if PWout<PWin then MoveUp
if PWout>PWin then MoveDown
MoveDown: 'Routine to decrease the output pulse width
if skip>=Delay then Skip1 'Loop to delay change to Delay x 20ms
Skip=Skip+1
goto Skip2
Skip1:
Skip=0
PWout=PWout-1
Skip2:
pulsout 2,PWout 'Send the output pulse to the servo
goto loop1 'Return to re-measure the input pulse
MoveUp: 'Routine to increase the output pulse width
if skip>=Delay then Skip3 'Loop to delay change to Delay x 20ms
Skip=Skip+1
goto Skip4
Skip3:
Skip=0
PWout=PWout+1
Skip4:
pulsout 2,PWout 'Send the output pulse to the servo
goto loop1 'Return to re-measure the input pulse
StayPut: 'Routine to send the same output pulse
pulsout 2,PWout
goto loop1 'Return to re-measure the input pulse
StraightThru:
pulsin 3,1,PWin
if PWin<75 or PWin>225 then restart1 'Go back if no valid input detected
PwinErr=PWin-PWinPrev
if PWinErr<2 or PWinErr>254 then Stay 'Add 2 units of hysteresis
pulsout 2,PWin
PWinPrev=PWin
goto StraightThru: 'Return to re-measure the input pulse
Stay:
pulsout 2,PWinPrev 'Set output pulse to input pulse
goto StraightThru: 'Return to re-measure the input pulse